Abstract
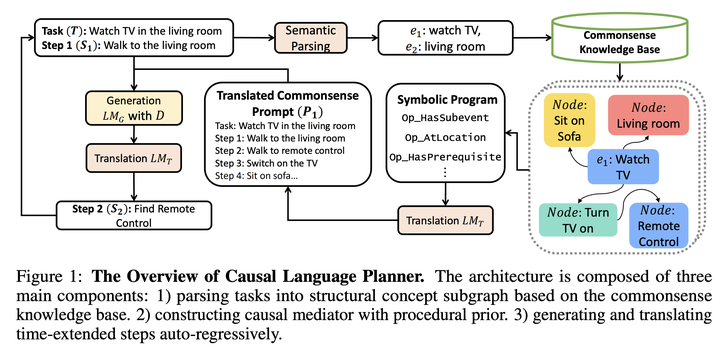
Language planning aims to implement complex high-level goals by decomposition into sequential simpler low-level steps. Such procedural reasoning ability is essential for applications such as household robots and virtual assistants. Although language planning is a basic skill set for humans in daily life, it remains a challenge for large language models (LLMs) that lack deep-level commonsense knowledge in the real world. Previous methods require either manual exemplars or annotated programs to acquire such ability from LLMs. In contrast, this paper proposes Neuro-Symbolic Causal Language Planner (CLAP) that elicits procedural knowledge from the LLMs with commonsense-infused prompting. Pre-trained knowledge in LLMs is essentially an unobserved confounder that causes spurious correlations between tasks and action plans. Through the lens of a Structural Causal Model (SCM), we propose an effective strategy in CLAP to construct prompts as a causal intervention toward our SCM. Using graph sampling techniques and symbolic program executors, our strategy formalizes the structured causal prompts from commonsense knowledge bases. CLAP obtains state-of-the-art performance on WikiHow and RobotHow, achieving a relative improvement of 5.28% in human evaluations under the counterfactual setting. This indicates the superiority of CLAP in causal language planning semantically and sequentially.
Wanrong Zhu
CS Ph.D. Candidate
My research interests include vision-and-language problems and text generation.